Розроблено комплекс методів і алгоритмів для дослідження керованих систем спеціального вигляду – систем рухомого керування. Для ряду об’єктів космічного і наземного призначення проведено порівняльний аналіз використання принципів традиційного і рухомого керування. Виявлено ситуації, для яких рухоме керування є переважним, а в окремих випадках – єдиним варіантом побудови автоматичної системи. Теоретичні результати досліджень було покладено в основу алгоритмів системи керування промислового робота ПІВДЕНЬ‑1, розробленого у відділі за замовленням ВО “Південмаш”. Виготовлені зразки робота пройшли успішну експлуатацію у замовника на ділянці гарячої висадки болтів.
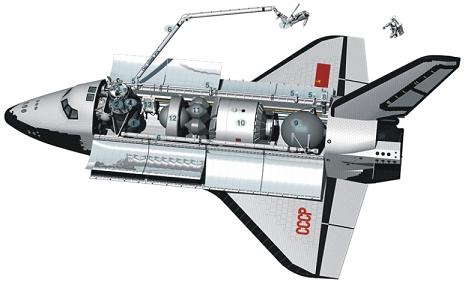
Дослідження динаміки космічного маніпулятора було розпочато в 80-ті роки і потім продовжено за контрактами з ЦНДІ робототехніки і технічної кібернетики, який проєктував космічний маніпулятор для системи “Буран”. Результати досліджень були використані при відпрацюванні виробів нової техніки в обсязі первинного впровадження в ЦНДІ робототехніки і технічної кібернетики. В результаті дослідження динаміки бортових маніпуляторів виділено клас систем взаємного позиціонування космічного апарата і корисного навантаження, до якого можуть бути віднесені як існуючі транспортні системи переміщення корисного вантажу щодо орбітального корабля за допомогою антропоморфного маніпулятора (механізму послідовної кінематики), так і перспективні системи високоточного позиціонування корисного навантаження з використанням маніпуляційного механізму паралельної кінематики.